2.5% accurate
low cost
medium cost
outdoor only
single POV
in&outdoor
3D ball tracking
in&outdoor
| Sports Performance Technologies | Sports technology companies | ||||||||||||||||||||||||||||||
| single use case 2.5% accurate low cost |
versatile medium cost outdoor only |
medium accuracy single POV in&outdoor |
high accuracy 3D ball tracking in&outdoor |
||||||||||||||||||||||||||||
| LPS:local positioning system & GPS based sports tracking | Sports technology companies | ||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Metric | Description | unit | Vector S7 | Clearsky T6 | AT02 | Apex | Realtrack | ATO1 | S01 | T01 | UWT1320 | TPV23 | ZXY arena | VIPS | Tracker | S6P1 | |||||||||||||||||||||||||||||||||||||||
| 2024 SALES PRICES | Product: Athlete Tag | € | 2351 | 2100 | 300 | 2000 | 1500 | 2803 | 1050 | 3000 | 430 | ||||||||||||||||||||||||||||||||||||||||||||
| Match sportsball: sensors + LPS | € | x | x | x | x |
v

|
x |

|
x | x | x |
v
|
|||||||||||||||||||||||||||||||||||||||||||
| Mobile system | 6 anchors, 2 balls, 2 player tags | € | 3900 | 12040 | |||||||||||||||||||||||||||||||||||||||||||||||||||
| Field-System price (initial cost) | 10 anchors, 20 tags + software | € | 54000 | 62000 | 10000 | 58000 | 34612 | 39000 | 48000 | 24000 | NFL 15M/yr | 72000 | 29000 | 75000 | 21930 | 43000 | |||||||||||||||||||||||||||||||||||||||
| Annual fee | 20 players, 1 system | € | 10700 | 16200 | 1440 | 17300 | 22000 | 27000 | 32000 | 1200 | 140000 | 10500 | 19000 | 8500 | 2150 | ||||||||||||||||||||||||||||||||||||||||
| DIMENSIONS, WEIGHT and display technology | |||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Dimensions of the TAG | Length x Width | mm | 81 x 43 | 48 x 40 | 65 x 35 | 84 x 44 | 81 x 45 | 49 x 33 | 91 x 45 | 61 x 45 | D=27 | 89 x 60 | 50 x 36 | 124 x 74 | 63 x 40 | 41 x 29 | |||||||||||||||||||||||||||||||||||||||
| TAG | Thickness / Weight | mm / g | 16 / 53 | 6 / 53 | 11 / 25 | 20 / 63 | 15 / 70 | 9,3 / 16 | 15 / 57 | 14 / 38 | 22 / 12 | 15 / 61 | 11 / 21 | 124 / 350 | 19 / 58 | 15 / 22 | |||||||||||||||||||||||||||||||||||||||
| Display | Pixels / Technology | x | x | 128x128 /MIP | 96x16 / OLED | 96x16 / OLED | x | x | x | x | 96x16 / OLED | x | x | 64x128 /OLED | x | ||||||||||||||||||||||||||||||||||||||||
| Display energy use / Always-on | micro-Watt (< is better) / Always-on | µW / . | 4 / v | 20000 / x | 20000 / x | 20000 / x | 26000 / x | ||||||||||||||||||||||||||||||||||||||||||||||||
| Mobile system, 6 tripods | 6 tripods with anchors, weight (< is better) | kg | 7.8 | 19.8 | |||||||||||||||||||||||||||||||||||||||||||||||||||
| Mobile system | Tripod, min / max height | cm | 60 / 305 | 70 / 226 | |||||||||||||||||||||||||||||||||||||||||||||||||||
| BATTERY capacity. HOURS of operation: The figure is based on realworld chipset energy consumption and onboard battery capacity as found in FCC documentation linked below, and, or end user reports. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Battery capacity (LiPo) | Capacity (higher is better) | mAh/Wh | 455 / 1.60 | 350 / 1.25 | 500 / 1.8 | 400 / 1.50 | 1300 / 4.5 | 250 / 0.88 | 400 / 1.5 | 1500 / 5.25 | 360 / 1.33 | 200 / 0.74 | |||||||||||||||||||||||||||||||||||||||||||
| Energy consumption, < is better | UWB / GPS / IMU (on / 10Hz / 100+Hz) | mW | 550 | 400 | 180 | 400 | 1125 | 290 | 400 | 900 | 2000 | 532 | 200 | ||||||||||||||||||||||||||||||||||||||||||
| Operational hrs, max update rate | active IMU+BT+LPS (higher is better) | hrs | 3 | 3 | 10 | 4 | 4 | 3 | 3.8 | 5 | 5.8 | 2.5 | 1 | ||||||||||||||||||||||||||||||||||||||||||
| ACCURACY and LATENCY (lantency = the delay in forwarding data) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Accuracy UWB static position | 3th party verified, static [rmse] | cm | ≤35 FiFa 2020 | ≤35 FiFa 2020 | ≤4 ABB, IOC | ≤20 | 22, 7 | ≤25 FiFa 2021 | ≤10 | ≥30 | ≥50 | ≤2 | 10 | 10 | |||||||||||||||||||||||||||||||||||||||||
| Accuracy UWB, speed > 20m/s | 3th party verified, dynamic [rmse] | cm | >40 | >40 | <10 | <20 | ≤22 FiFa | ≤25 | 10 | >30 | >50 | ≤2 | 10 | 10 | |||||||||||||||||||||||||||||||||||||||||
| Measurement technolgy | 1 way TDoA, 2way TWR (more accuracte) | TDoA | TDoA | TWR | TDoA | TDoA | TDoA | TWR | TDoA | TDoA | TDoA | TWR | TWR | ||||||||||||||||||||||||||||||||||||||||||
| Position latency (delay) | Time: Event to PC/mobile (< is better) | ms | 200 | 200 | 40 | 1350 FiFa '21 | 250 FiFa '21 | 150 | 150 | 200 | 2200 | ||||||||||||||||||||||||||||||||||||||||||||
| LPS PERFORMANCE (range, capacity. update rate, 2D/3D) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||
| LPS max range | UWB 6.8Mbps, Lign Of Sight (LOS) | m | 250 | 300 | 300 | 100 | 150 | 200 | 200 | 200 | 100 | WiFi:25mW | WiFi | 50 | 150 | 100 | |||||||||||||||||||||||||||||||||||||||
| LNA on anchor | Low Noise Amplifier, increases range | v | v | v | x | x | v | v | x | x | x | x | x | ||||||||||||||||||||||||||||||||||||||||||
| LNA on tags | Low Noise Amplifier, increases range | v | v | v | x | x | x | x | x | x | x | v | x | ||||||||||||||||||||||||||||||||||||||||||
| LPS tag antenna type | Ceramics < lower efficiency & range | ceramic | full stripline | full stripline | ceramic | ceramic | ceramic | full stripline | ceramic | 3D | ceramic | ceramic | ceramic | ||||||||||||||||||||||||||||||||||||||||||
| Capacity per LPS channel | Locates/sec (amount of tags @ 1Hz) | -/s | 1000 | 1000 | 2800 | 1000 | 1060 | 1000 | 1000 | 1000 | 1000 | 1000 | 1000 +video | 250 | 1000 | 1000 | |||||||||||||||||||||||||||||||||||||||
| Updates (position + IMU) | Update rate [Hz] for: [# athlete tags] | Hz | 20 : 50 | 20 : 50 | 25 : 112 | 20 : 50 | 18: 70 | 20 : 49 | 20 : 50 | 20 : 50 | 20 : 50 | 20 : 49 | 20 : 50 | 20 : 50 | |||||||||||||||||||||||||||||||||||||||||
| Updates, multi players, 2D/3D | Locates per second per player /2D.3D | -/s | 10 / 2D | 10 / 2D | 25 / 3D | 10 / 2D | 10 / 2D | 20 / 2D | 10 / 2D | 20 / 2D | 25 / 2D | 10 / 2D | 20 / 2D | 10 / 3D | 10 / 2D | ||||||||||||||||||||||||||||||||||||||||
| Realtime 3D position interval | Milli seconds (lower is better) | ms | 100 | 100 | 5 | 100 | 100 | 20 | 100 | 100 | 20 | 200 | |||||||||||||||||||||||||||||||||||||||||||
| UWB frequency or WiFi | Single or multi-channel, for higher capacity | GHz | 4 | 4 | 4.5 6.5 | 4 | 4 | 4.5 6.5 | 4.5 6.5 | 6.5 | 7.6 | 5.7GHz WiFi | 5GHz WiFi | 4 6.5 | 4 | 4 | |||||||||||||||||||||||||||||||||||||||
| LPS bandwidth | Higher is better | MHz | 500 | 500 | 500 | 500 | 500 | 500 | 500 | 500 | 500 | 135 | 10 | 500 | 500 | 500 | |||||||||||||||||||||||||||||||||||||||
| REALTIME PERFORMANCE FEEDBACK | |||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Outdoor RGB LED panel | Realtime performance feedback | x | x | 12 Watt | x | x | x | x | x | x | x | x | x | x | x | ||||||||||||||||||||||||||||||||||||||||
| SPORTS BALLS Tracked + sensors | |||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Sportball impact detection | Impact detection, checks/sec | Hz | 1000 | 500 | 200 | x | x | ||||||||||||||||||||||||||||||||||||||||||||||||
| Update rate for sportballs | Locates per second requires 50 or higher | -/s | 150 | 50 | 20 | 15 | 3 | ||||||||||||||||||||||||||||||||||||||||||||||||
| BALL: Sensor | Weight (lower is better) | g | 3 | 14 | 31 | 21 | 12 | ||||||||||||||||||||||||||||||||||||||||||||||||
| BALL: Sensor suit | IMU, P Pressure | IMU+P | IMU | IMU | x | IMU | |||||||||||||||||||||||||||||||||||||||||||||||||
| Sensor Placement / mass balance | Centered Y/N = Dzhanibekov effect | . | Y | Y | N | N | N | ||||||||||||||||||||||||||||||||||||||||||||||||
| MOTION CAPTURE IMU (inertial measurement unit) in the (tag) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||
| IMU sensor (Motion Capture) | IMU sensor update rate (output) | Hz | 100 | 100 | 200 | 100 | 100 | 200 | 100 | 100 | x | x | 100 | 60 | x | 100 | |||||||||||||||||||||||||||||||||||||||
| IMU samples/s:Accelerometer, Gyro | Internal sample rate (higher is better) | Hz | 100, 100 | 100, 100 | 8000, 8000 | 953, 953 | 1000, 1000 | 9000, 4500 | 1000, 1000 | 1000, 1000 | x | x | 1000, 1000 | 800, 800 | 1000, 1000 | 1000, 1000 | |||||||||||||||||||||||||||||||||||||||
| IMU Gyro,Accelerometer,Magneto | Effective bit resolution (higher is better) | bits | 16:16:14 | 16:16:14 | 19:18:16 | 16:16:14 | 16:16:14 | 16:16:14 | 16:16:14 | 16:16:14 | x | x | 16:16:14 | 16:16:14 | 16:16:14 | 16:16:14 | |||||||||||||||||||||||||||||||||||||||
| IMU range:Accelerometer, Gyro | G : dps (degree/sec) (higher is better) | 16 : 2000 | 16 : 2000 | 32 : 4000 | 16 : 2000 | 32 : 2000 | 30 : 4000 | 32 : 2000 | 32 : 2000 | x | x | 32 : 2000 | 32 : 2000 | 16 : 2000 | 32 : 2000 | ||||||||||||||||||||||||||||||||||||||||
| Motion capture data offloading | UWB realtime wireless IMU offload | V | V | V | V | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Motion capture data offloading | WiFi based (shared w.o. WiFi users) | V | V | V | V | V | V | ||||||||||||||||||||||||||||||||||||||||||||||||
| Motion capture data offloading | Stored on board/tag for post analysis | V | |||||||||||||||||||||||||||||||||||||||||||||||||||||
| Integrated systems or sensors in the (tag) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Blood oxygen sensor integrated | Sensor values in realtime via UWB | SpO2 | V | V | |||||||||||||||||||||||||||||||||||||||||||||||||||
| Haptic (motor) | Tactile feedback | V | V | V | V | ||||||||||||||||||||||||||||||||||||||||||||||||||
| GPS (GLONASS, Galileo, BeiDou) | V | V | V | V | V | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Bluetooth | V | V | V | V | V | V | V | ||||||||||||||||||||||||||||||||||||||||||||||||
| USB | USB data exchange port | V | V | V | |||||||||||||||||||||||||||||||||||||||||||||||||||
| WiFi | V | V | |||||||||||||||||||||||||||||||||||||||||||||||||||||
| External sensor integration | |||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Heartratebelt Bluetooth, ANT pair | V | V | V | V | |||||||||||||||||||||||||||||||||||||||||||||||||||
| Heart rate belt 5.3kHz | V | V | |||||||||||||||||||||||||||||||||||||||||||||||||||||
| Technology used (tag) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Chipset, main controller (tag) | STM32H753AII6 | STM32 | nRF5340 core1 | nRF52840 | Atom E640 | ATSAM4S | ATSAM4S | Xc2s200 | nRF52832 | nRF52832 | |||||||||||||||||||||||||||||||||||||||||||||
| Wireless BT 5.0 & USB controller | nRF52832-CIA | nRF5340 core2 | integrated | Intel Edison | x | x | x | x | x | ||||||||||||||||||||||||||||||||||||||||||||||
| LPS Transceiver | Chipset or '-M' for module | DW1000 | DW1000 | DW1000 | DW1000 | DW1000-M | DW1000 | DW1000 | DW1000 | discrete | discrete | DW1000 | DW1000 | DW1000 | |||||||||||||||||||||||||||||||||||||||||
| LPS Timebase | TCXO (temp. compensated == more stable) | TCXO | TCXO | TCXO | X-tal | X-tal | X-tal | TCXO | X-tal | X-tal | TCXO | TCXO | X-tal | X-tal | |||||||||||||||||||||||||||||||||||||||||
| GPS chipset | All OEM use swiss U-blox for GPS | EVA M8Q-010 | x | Zoe-M8B | Max-M8Q | M8W | x | x | x | x | x | x | Max-M8Q | x | x | ||||||||||||||||||||||||||||||||||||||||
| GPS Sensitivity | higher is better | |-dBm| | 166 | 167 | 164 | 164 | 164 | ||||||||||||||||||||||||||||||||||||||||||||||||
| GPS, GLONASS, Galileo, BeiDou | V | v | V | V | V | ||||||||||||||||||||||||||||||||||||||||||||||||||
| Inside view (FCC) |  |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
||||||||||||||||||||||||||||||||||||||||||
| More info : |  |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
| Boards | 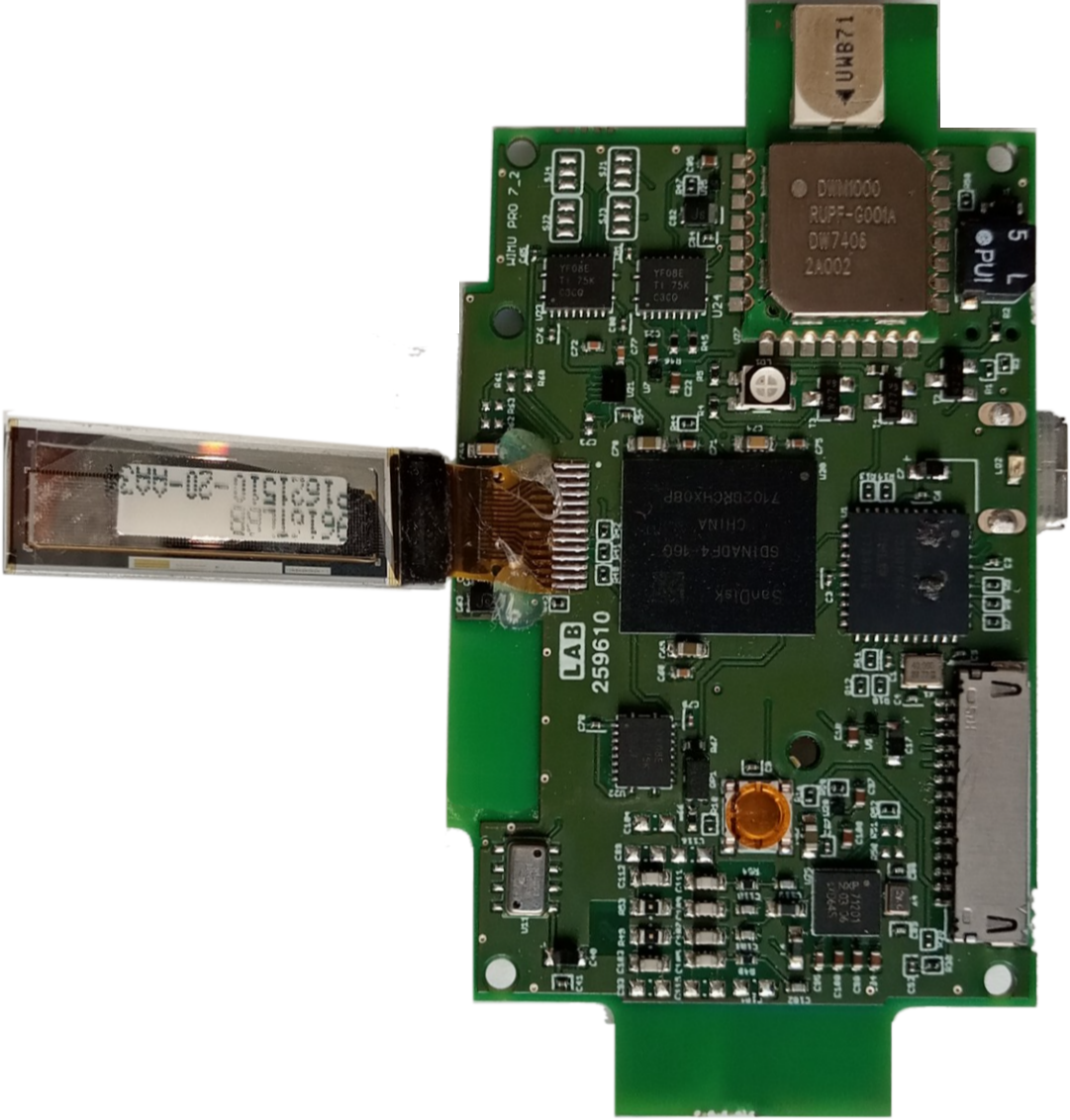 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
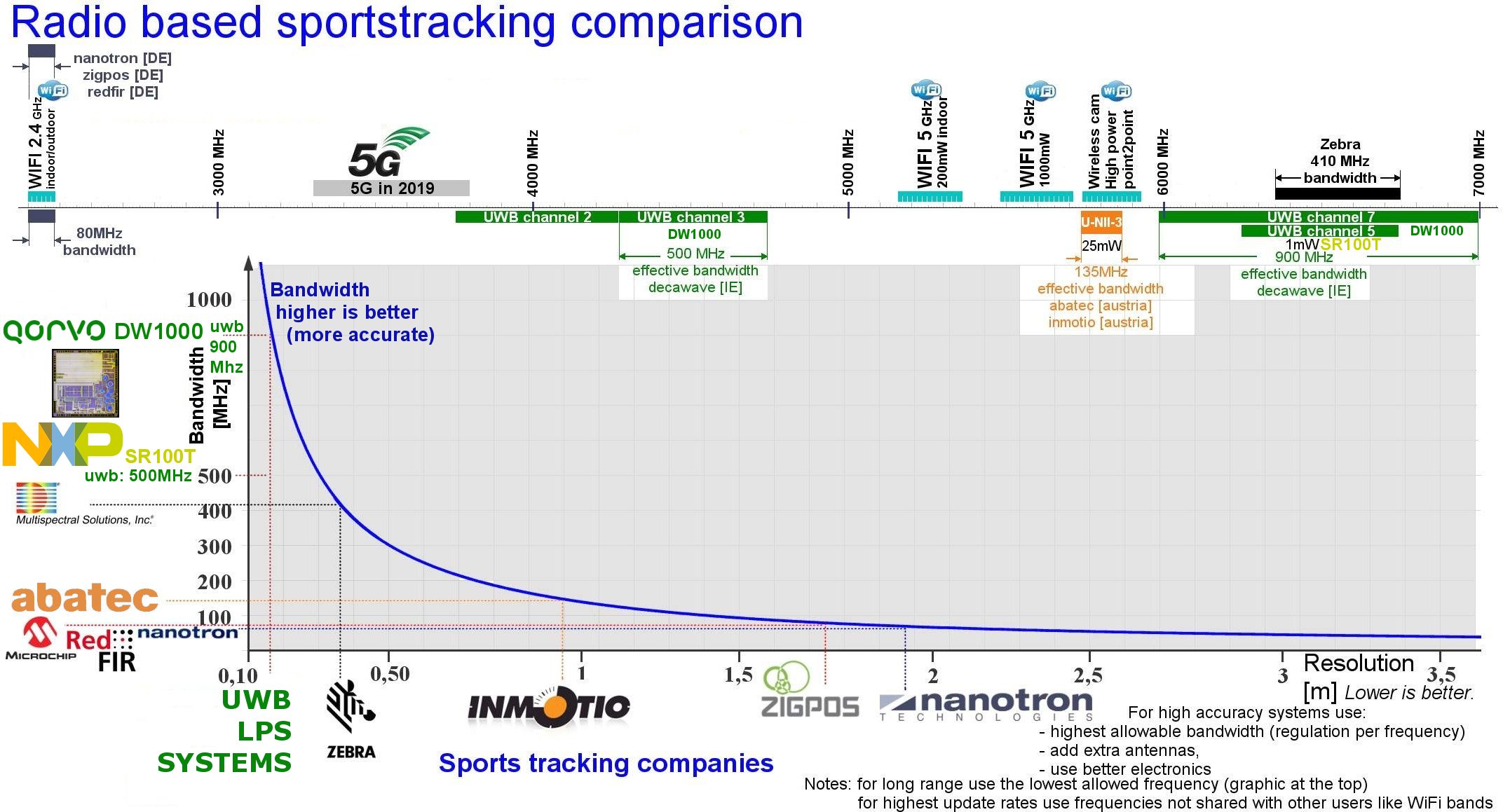 |
Radio based sports tracking comparison Explantion of the graphics The graphic is based on radar tracking physics. At the top of the graphic: The frequency spectrum shows how wide the bandwidth (BW) is relative to WiFi. WiFi typically has 20 MHz of bandwidth (max 80 MHz). UWB (ultra wideband) 500 MHz in green. 5G Phone networks can operate at 3500 MHz. UWB channels 3 and 5 are most used. For accurate distance measurements a 500+MHz bandwidth works best. For sports tracking UWB (ultra wideband) is most accurate.
Improvements in accuracy are possible by: - better electronics timing (TCXO) - better signal quality, Low Noise Amplifier - use more than 1 antenna - using more measurements per second. Higher update rates - using more anchors (reference points) - software algorithms and filtering |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3D sport pefromance tracking Most technologies have lower accuracy at longer distances. Sustainable accuracy at a distance is provided by: - Laser ranging - UWB - Motion capture - Infrared optical cameras are accurate. Range up to 30 meter. OUTDOOR Optical (camera) systems have issues with outdoor conditions like direct sunlight, snow, blocking of direct view by field players and loss of tracking in low light conditions. 3D tracking Multiple reference points for observations are required for any technology Single point of view, stereo scopic cameras with AI also need multiple vantage point to solve oclusion and degrading accuracy over distance, low update rate and massive data processing and installation cost (cabling). |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||